В динамичном мире робототехники одной из областей, где наблюдаются замечательные достижения, является область роботизированных захватов. Эти сложные инструменты больше не ограничиваются только механической прочностью и точностью; они превратились в сложные системы, объединяющие машиностроение, искусственный интеллект и материаловедение. Эта эволюция прокладывает путь для роботов к выполнению более сложных и чувствительных задач, революционизируя отрасли от производства до здравоохранения.

Традиционные роботизированные захваты были в первую очередь разработаны для прочности и точности, что ограничивало их конкретными задачами. Однако недавние разработки привели к созданию более адаптивных и чувствительных захватов. Эти усовершенствованные захваты способны обрабатывать различные объекты, от хрупкой стеклянной посуды до компонентов неправильной формы, без риска повреждения. Эта универсальность достигается за счет интеграции мягкой робототехники, которая использует такие материалы, как силикон и полимеры, чтобы имитировать гибкость и мягкость человеческой руки.
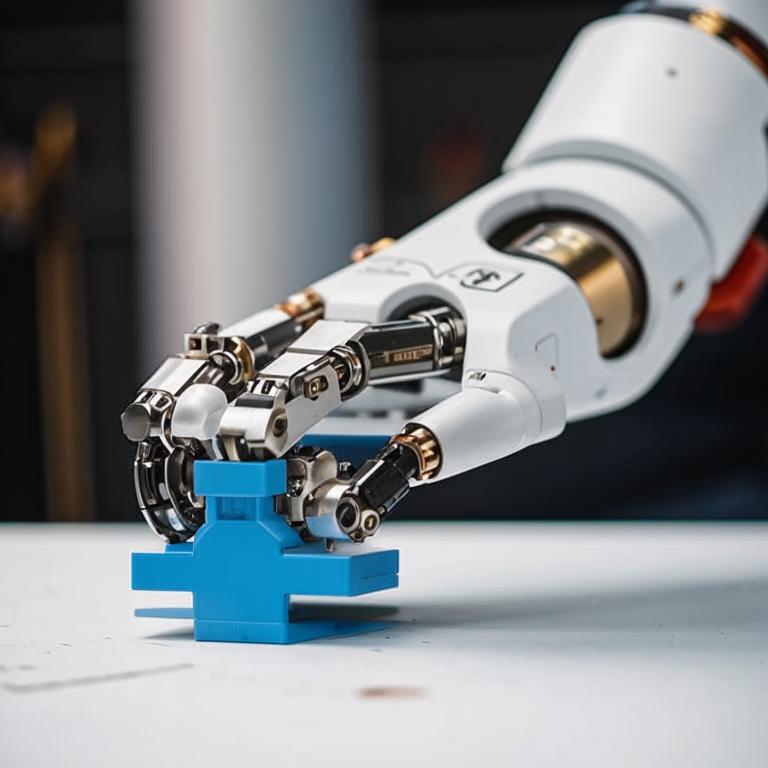
Одним из ключевых достижений в этой области является разработка захватов, которые могут работать с деликатными и разнообразными по форме объектами. В отличие от своих предшественников, которые были ограничены конкретными, часто жестко определенными задачами, эти современные захваты могут умело управлять такими хрупкими предметами, как стеклянная посуда, или такими странными по форме предметами, как автомобильные детали, и все это без причинения какого-либо ущерба.
Например, рассмотрим роботизированный захват в заводских условиях, предназначенный для работы с чувствительными электронными компонентами. Эти компоненты, часто нерегулярные по форме и хрупкие, требуют точной манипуляции. Традиционные захваты могут либо не схватить эти элементы эффективно, либо повредить их из-за чрезмерного усилия. Напротив, мягкий роботизированный захват с его податливой структурой может аккуратно, но надежно обрабатывать эти компоненты, обеспечивая безопасность и эффективность на производственной линии.
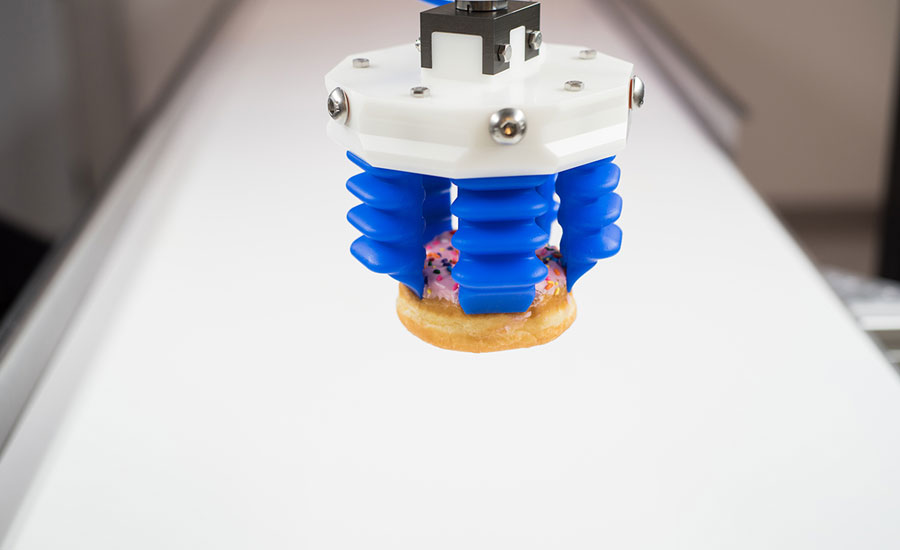
Другой пример можно увидеть в пищевой промышленности, где обработка различных предметов, таких как фрукты и овощи, каждый из которых имеет разную форму, размер и текстуру, является сложной задачей. Продвинутые захваты, оснащенные мягкими, адаптивными пальцами, могут поднимать и размещать эти предметы, не повреждая их, что было невозможно при использовании старых конструкций захватов.
Одним из ключевых достижений в этой области является разработка захватов, которые могут работать с деликатными и разнообразными по форме объектами. В отличие от своих предшественников, которые были ограничены конкретными, часто жестко определенными задачами, эти современные захваты могут умело управлять такими хрупкими предметами, как стеклянная посуда, или такими странными по форме предметами, как автомобильные детали, и все это без причинения какого-либо ущерба.
Например, рассмотрим роботизированный захват в заводских условиях, предназначенный для работы с чувствительными электронными компонентами. Эти компоненты, часто нерегулярные по форме и хрупкие, требуют точной манипуляции. Традиционные захваты могут либо не схватить эти элементы эффективно, либо повредить их из-за чрезмерного усилия. Напротив, мягкий роботизированный захват с его податливой структурой может аккуратно, но надежно обрабатывать эти компоненты, обеспечивая безопасность и эффективность на производственной линии.
Другой пример можно увидеть в пищевой промышленности, где обработка различных предметов, таких как фрукты и овощи, каждый из которых имеет разную форму, размер и текстуру, является сложной задачей. Продвинутые захваты, оснащенные мягкими, адаптивными пальцами, могут поднимать и размещать эти предметы, не повреждая их, что было невозможно при использовании старых конструкций захватов.
Одной из заметных тенденций в индустрии робототехнических захватов является внедрение интеллекта посредством возможностей машинного обучения.
Интеллектуальные захваты представляют собой значительный шаг вперед, позволяя роботам обрабатывать более широкий спектр объектов различных форм, размеров и материалов. Способность к обучению и адаптации делает эти захваты ценным активом в динамичных средах, например, на производстве, где конструкции изделий могут часто меняться.
Захваты, оснащенные системами технического зрения, могут идентифицировать объекты, оценивать их размеры и определять оптимальную стратегию захвата на основе данных в реальном времени. Этот уровень восприятия неоценим в таких приложениях, как контроль качества на производстве, где точность обработки и проверки имеют решающее значение.
Нейронные сети особенно важны в этом прогрессе. Они позволяют роботизированным захватам обрабатывать огромные объемы данных со своих датчиков, что приводит к более интеллектуальным и отзывчивым действиям. Этот аспект искусственного интеллекта позволяет роботам в реальном времени вносить коррективы для оптимального управления, обеспечивая эффективность и снижая вероятность ошибок или повреждений.
Интеллектуальные захваты представляют собой значительный шаг вперед, позволяя роботам обрабатывать более широкий спектр объектов различных форм, размеров и материалов. Способность к обучению и адаптации делает эти захваты ценным активом в динамичных средах, например, на производстве, где конструкции изделий могут часто меняться.
Захваты, оснащенные системами технического зрения, могут идентифицировать объекты, оценивать их размеры и определять оптимальную стратегию захвата на основе данных в реальном времени. Этот уровень восприятия неоценим в таких приложениях, как контроль качества на производстве, где точность обработки и проверки имеют решающее значение.
Нейронные сети особенно важны в этом прогрессе. Они позволяют роботизированным захватам обрабатывать огромные объемы данных со своих датчиков, что приводит к более интеллектуальным и отзывчивым действиям. Этот аспект искусственного интеллекта позволяет роботам в реальном времени вносить коррективы для оптимального управления, обеспечивая эффективность и снижая вероятность ошибок или повреждений.

Разработка гибридных захватов сочетает в себе лучшие характеристики как традиционных жестких захватов, так и современных мягких захватов. Эти гибриды могут выполнять широкий спектр задач, от деликатных до сложных, что делает их весьма универсальными. Такая адаптивность имеет решающее значение в отраслях, где роботам необходимо иметь дело с различными материалами и формами в рамках одного рабочего процесса.
В упаковочной промышленности гибридные захваты могут адаптироваться к различным продуктам: от жестких коробчатых предметов до мягких товаров неправильной формы. Такая адаптивность повышает эффективность упаковочных линий, позволяя осуществлять плавный переход между различными продуктами без необходимости менять или настраивать захват.
Другое применение гибридных захватов можно найти в области сельского хозяйства. Здесь их можно использовать для таких задач, как сбор фруктов и овощей, где требуется сочетание нежного прикосновения и крепкого захвата.
Традиционным захватам не хватало способности ощущать силу, приложенную во время захвата, или тактильной обратной связи, необходимой для деликатных задач. Захваты, оснащенные датчиками силы и тактильных ощущений, могут динамически регулировать силу захвата, обеспечивая надежный захват без повреждения хрупких предметов.
В упаковочной промышленности гибридные захваты могут адаптироваться к различным продуктам: от жестких коробчатых предметов до мягких товаров неправильной формы. Такая адаптивность повышает эффективность упаковочных линий, позволяя осуществлять плавный переход между различными продуктами без необходимости менять или настраивать захват.
Другое применение гибридных захватов можно найти в области сельского хозяйства. Здесь их можно использовать для таких задач, как сбор фруктов и овощей, где требуется сочетание нежного прикосновения и крепкого захвата.
Традиционным захватам не хватало способности ощущать силу, приложенную во время захвата, или тактильной обратной связи, необходимой для деликатных задач. Захваты, оснащенные датчиками силы и тактильных ощущений, могут динамически регулировать силу захвата, обеспечивая надежный захват без повреждения хрупких предметов.

Также появляются роботизированные захваты, черпающие вдохновение из животного мира. Ярким примером является мягкий роботизированный захват, напоминающий щупальце осьминога. Такая конструкция позволяет обхватывать и надежно захватывать нестандартные и деликатные объекты, что делает ее полезной в различных областях применения: от подводных исследований до медицинских операций.

Эволюция роботизированных захватов является свидетельством замечательных успехов в робототехнике. По мере того, как эти захваты становятся все более сложными, они открывают новые возможности для автоматизации и эффективности в различных отраслях.